 De multiples freins sur la route du véhicule autonome
De multiples freins sur la route du véhicule autonome
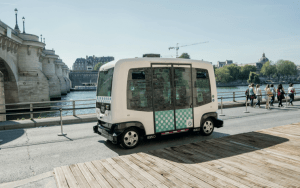
Ils sont principalement liés à la perception de son environnement par le véhicule autonome. Aujourd’hui Google ou d’autres font des essais avec des radars Lidar, qui sont très onéreux mais très précis. On essaie de développer des solutions alternatives. Des Lidar à bas coûts sont à l’étude. Mais ces solutions alternatives ne permettent pas d’avoir une précision fine, encore moins quand on monte en vitesse ou lorsqu’il y a de mauvaises conditions météo. Une autre solution alternative consiste à utiliser les solutions basées sur la communication entre les véhicules et les infrastructures (C-ITS). Cette solution apporte de la précision dans la perception. Je suis convaincu qu’il y aura convergence entre le véhicule autonome et le véhicule connecté et que par conséquent le véhicule autonome sera également connecté. Le gestionnaire d’infrastructure
Le dossier complet est réservé aux abonnés ou aux détenteurs d’un porte-monnaie électronique, connectez-vous pour y accéder.
*Formule numérique sans engagement à partir d’un 1€ par mois !

Publié le 28/03/2025 - JUNJIE LING

Publié le 27/03/2025 - JUNJIE LING

Publié le 25/03/2025